滚动信息2
发布时间:2026-06-02 16:13:34
摘要:无人机倾斜摄影技术凭借多角度成像、分辨率高与操作灵活等优势,正成为大比例尺数字线划地图(DLG)生产的重要数据获取手段。本文以典型城市区域为研究对象,系统分析了无人机倾斜摄影实景三维模型在DLG生产中的关键技术流程、精度控制方法与应用效果。实验结果显示,基于倾斜摄影生成的DLG平面RMSE为0.022 m,高程RMSE为0.023 m,完全满足1:500比例尺精度标准。相比传统航测方法,该技术在立面表达、边界识别和数据更新速度方面具有显著优势。本文最后提出了从数据获取、算法优化到智能化判读的多层次精度提升措施,为DLG的高效更新与三维测绘体系建设提供了技术参考。
关键词:无人机倾斜摄影;实景三维模型;大比例尺DLG;精度评价
1.大比例尺DLG概述
大比例尺数字线划地图(DLG)是反映地物空间分布及属性信息的重要基础地理数据产品,在城市规划、土地管理、工程建设与自然资源调查中具有核心地位。其主要特点是空间精度高、地物表达细致、信息更新频率要求快。随着测绘技术由传统地面测量向空地一体化方向发展,数据获取方式也从人工采集转向多源自动化融合[1]。
2.无人机倾斜摄影实景三维模型用于大比例尺DLG生产要点
2.1 数据获取与飞行规划
高质量的数据获取是DLG生产精度的前提。无人机倾斜摄影需通过科学的飞行规划确保影像重叠度与分辨率满足大比例尺精度要求。一般情况下,航向重叠度应不低于80%,旁向重叠度不低于70%,以保证三维重建的完整性与模型精度。飞行高度需根据地物复杂程度与地面分辨率要求灵活调整,城市建筑区宜采用较低航高以提升模型细节[2]。航线布设应结合地形起伏、障碍物分布及光照条件,避免阴影、反射或遮挡对影像质量的影响。在传感器选择方面,倾斜相机应具备多镜头同步曝光能力,以同时获取垂直与多角度影像,从而实现地物立面信息的完整表达。
2.2 三维重建与模型精度控制
实景三维模型的精度直接决定DLG产品的可靠性。在数据处理阶段,应采用结构光束法平差(SFM)与密集匹配算法对多视影像进行空三重建,生成高精度点云数据与数字表面模型(DSM)。为减少系统误差,应通过地面控制点与检查点进行严格的几何校正与精度评估。对于建筑密集区或高差较大的地形,应采用分块重建与边界拼接技术,确保不同模型单元间的空间一致性。精度控制应遵循国家测绘地理信息标准,对平面、垂直及相对精度进行系统评估,确保模型误差控制在大比例尺DLG(如1:500或1:1000)规定范围内。
2.3 实景模型矢量化与DLG数据提取
实景三维模型的核心价值在于其可视化与几何精确性为DLG要素提取提供直接依据。在DLG生产中,可通过模型矢量化技术实现地物边界线、建筑轮廓、道路网及地形要素的高效采集。基于三维模型的立体判读相较于二维影像,能更准确区分地物间的高差关系与空间结构,显著提高要素提取的准确率。在生产流程上,应结合影像模型与点云数据进行联合判读,通过人工辅助自动化提取工具完成线状与面状要素的快速生成。同时,可利用模型纹理信息进行地物类别识别,如区分硬质铺装、植被与建筑表面,从而实现语义化采编[3]。
3.无人机倾斜摄影实景三维模型用于大比例尺DLG生产的精度评价
3.1应用案例概况
为验证无人机倾斜摄影技术在大比例尺DLG生产中的精度与可行性,选取某城市核心区2.5 km²区域作为实验区。采用五镜头倾斜相机系统,航高约为160 m,地面分辨率(GSD)为0.035 m,航向重叠度80%,旁向重叠度75%。地面布设控制点12个、检查点8个,利用GNSS RTK测得其精度优于±0.02 m。影像采集后,使用Pix4Dmapper软件进行空三加密与模型重建,生成实景三维模型与DSM。
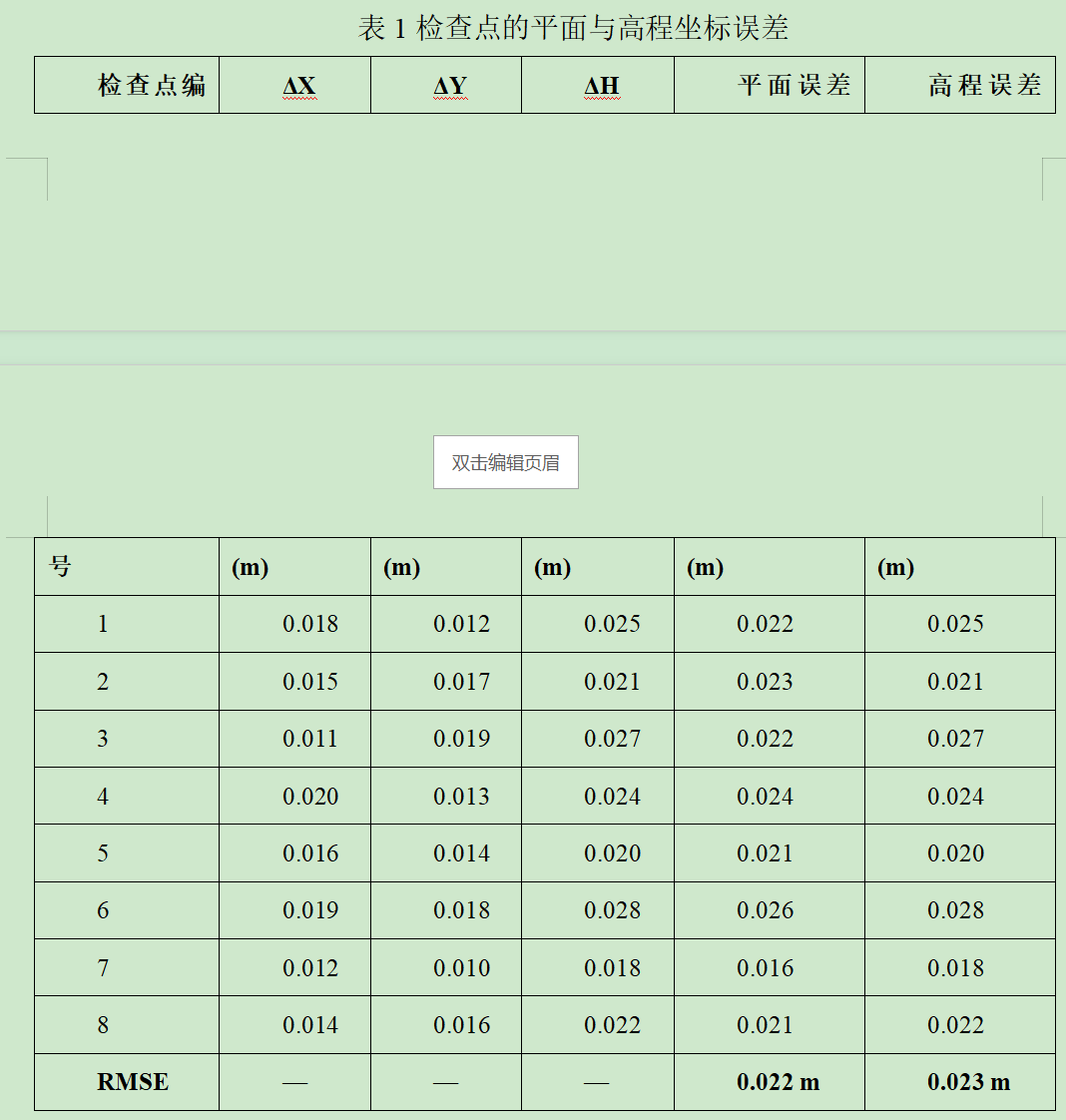
3.2应用效果
通过对8个检查点的平面与高程坐标差进行统计,计算出均方根误差(RMSE),结果如下表1所示。
3.3 精度提升措施
首先,飞行控制方面应采用差分GNSS定位与姿态实时解算系统(PPK/RTK),减少外方位元素误差,提高空三加密精度。
其次,在地面控制点布设上应遵循“均匀分布、重点加密”原则,在建筑密集区、地形起伏区适当增加GCP密度,以增强空间约束稳定性。数据处理阶段可通过多尺度影像匹配算法与点云滤波优化技术,降低遮挡和噪声对模型重建的影响。最后,在DLG采编环节可结合点云分类与AI辅助识别技术,实现地物提取的自动化与一致化,为地理信息精细化应用提供坚实基础。
4.结 语
本文研究表明,通过合理的飞行规划、精确的地面控制、先进的空三加密与模型优化处理,可实现厘米级精度的DLG成果,满足1:500及更高比例尺的制图要求。实景三维模型不仅提升了地物识别与空间表达能力,还显著提高了DLG的更新速度与信息丰富度。
周丹丹
河北诺亚人力资源发展集团有限公司
 冀公网安备 13010802000382号
冀公网安备 13010802000382号